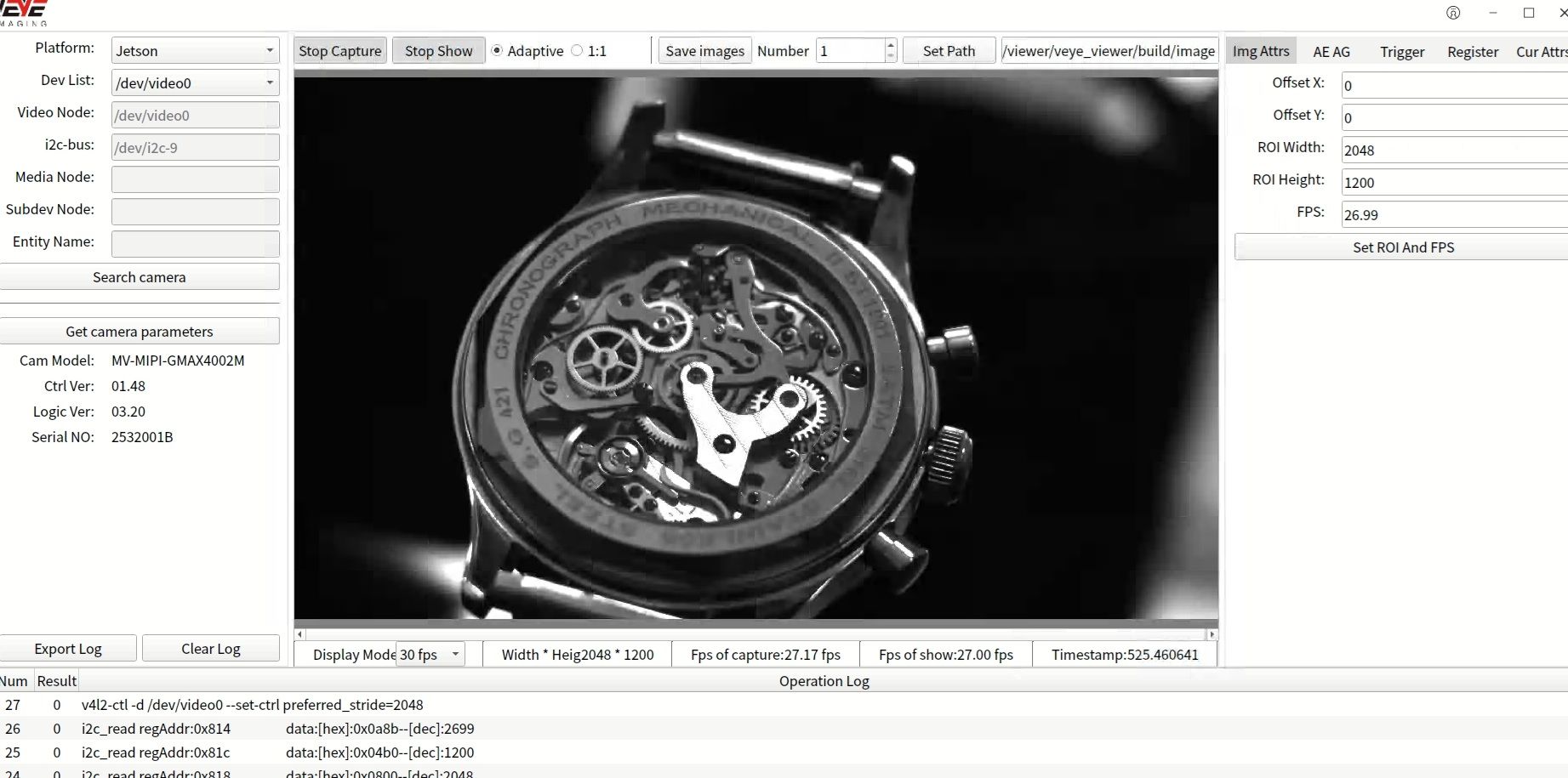
@veye_xumm Good news, it's working!
I changed the port to "CAM1" (i2c-9).
I believe the "v0.1.1_jetson" files were essential for proper operation.
Thank you for your efforts in helping.
@veye_xumm Good news, it's working!
I changed the port to "CAM1" (i2c-9).
I believe the "v0.1.1_jetson" files were essential for proper operation.
Thank you for your efforts in helping.
Thanks for all the help!
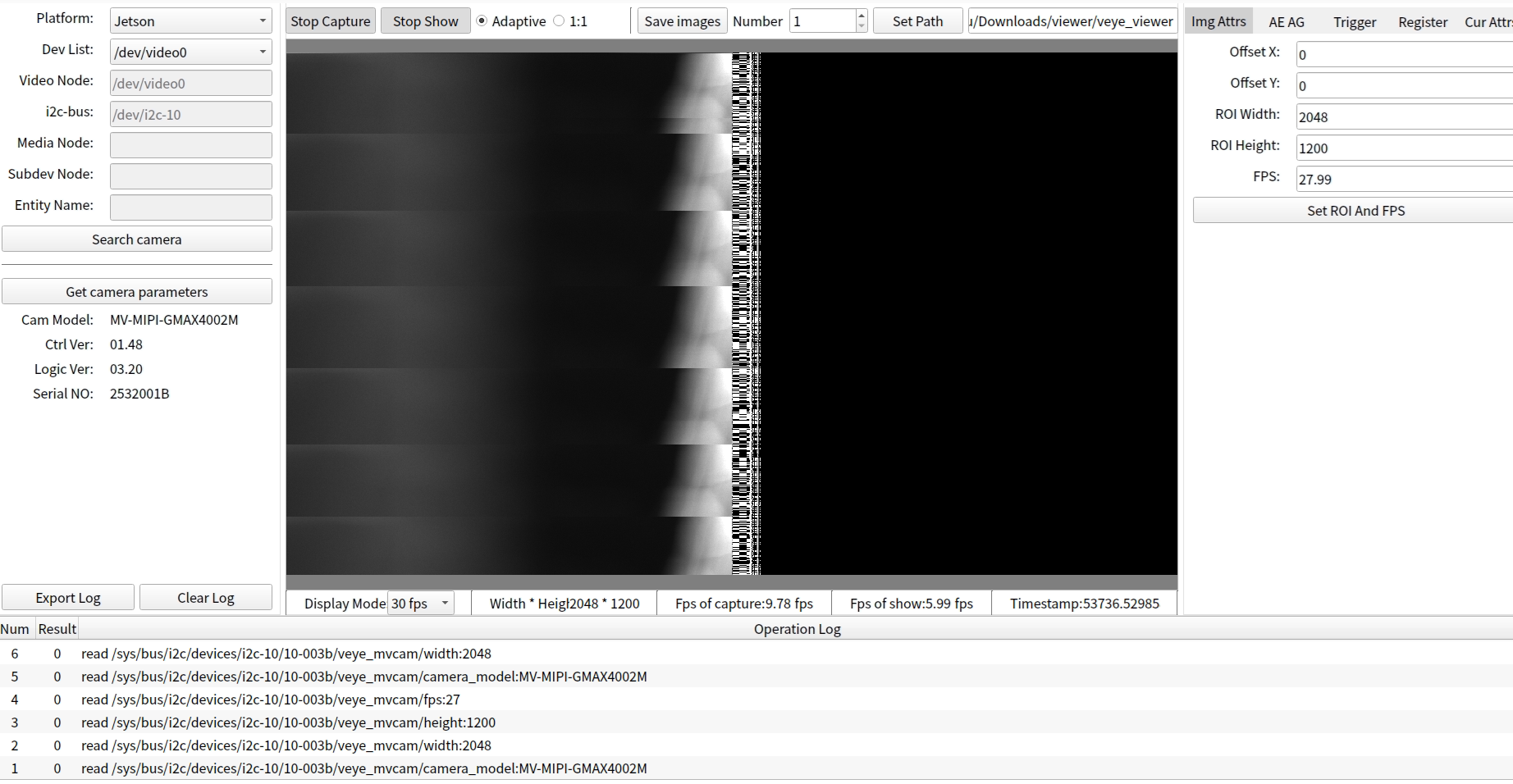
Thank you very much for the reply, it really helped! I followed the recommendations faithfully and successfully completed the installation. However, I'm facing a problem:
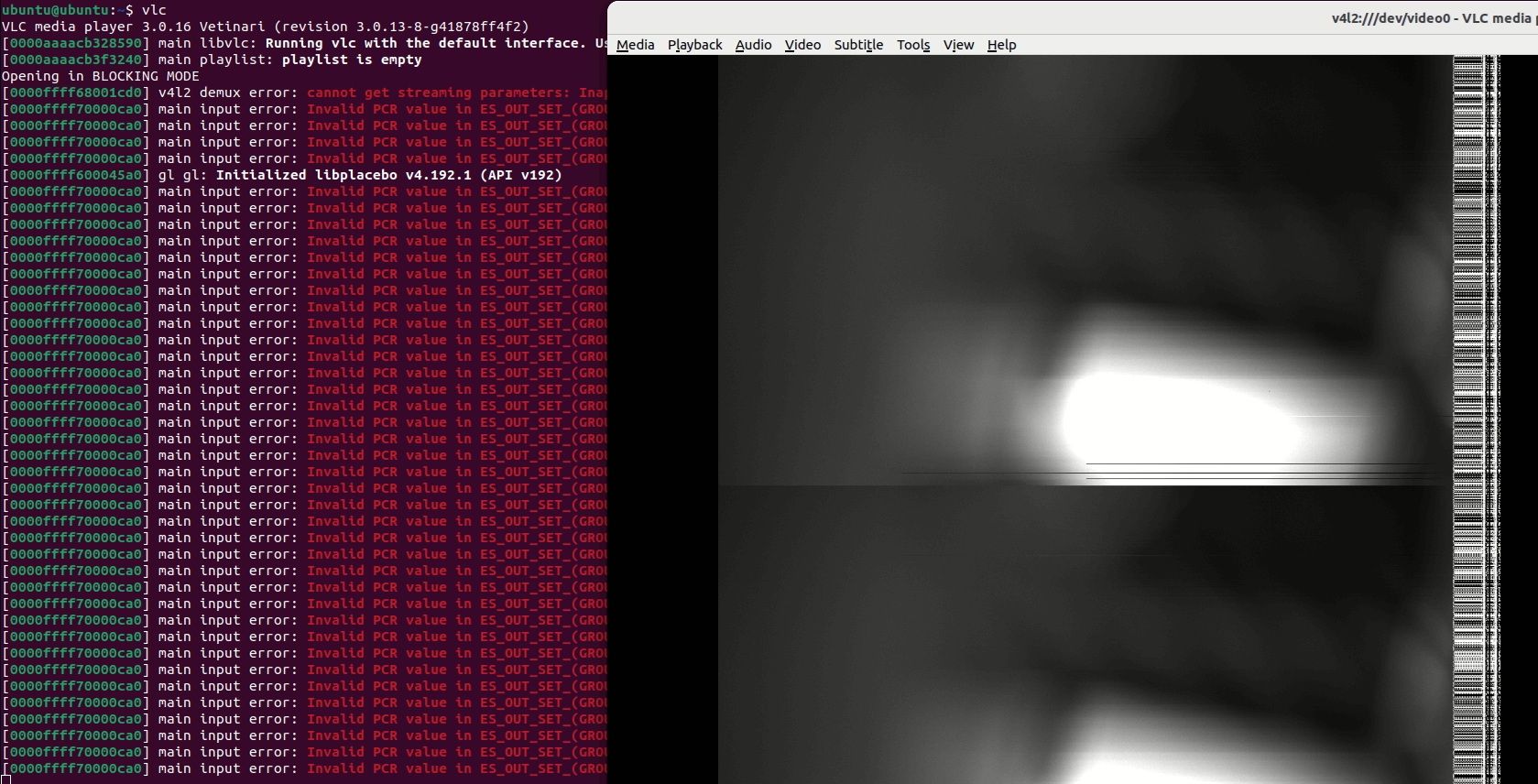
The camera generates an image with errors and very low fps, as shown in the attached image:
Attached is the sudo dmesg: ubuntu@ubuntu~$ sudo dmesg.txt
ubuntu@ubuntu:~$ sudo dmesg | grep -i 'fail'
[ 779.319935] mvcam 10-003b: camera_common_s_power: failed to enable mclk
[ 2254.006074] NVRM rpcRmApiControl_dce: NVRM_RPC_DCE: Failed RM ctrl call cmd:0x731341 result 0xffff:
[ 2334.553992] mvcam 10-003b: camera_common_s_power: failed to enable mclk
[ 3210.855067] NVRM rpcRmApiControl_dce: NVRM_RPC_DCE: Failed RM ctrl call cmd:0x731341 result 0xffff:
ubuntu@ubuntu:~$ sudo i2cdetect -y -r 9
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
ubuntu@ubuntu:~$ sudo i2cdetect -y -r 10
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- UU -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
ubuntu@ubuntu:~$ ls /sys/firmware/devicetree/base/bus@0/cam_i2cmux/i2c@0/
'#address-cells' rbpcv2_imx219_a@10 reg status
name rbpcv3_mvcam_a@3b '#size-cells'
ubuntu@ubuntu:~$ ls /sys/bus/i2c/drivers/
at24 fusb301 nxp-pca9450 sec_pmic
axp20x-i2c ina3221 pca953x simple-mfd-i2c
bd9571mwv max732x pca954x smbus_alert
bq27xxx-battery max77620 pf8x00 tpm_i2c_infineon
cros-ec-i2c max8973 pfuze100-regulator ucsi_ccg
cs2000-cp mp8859 rk808 usb3503
dummy mvcam rohm-bd718x7 vc5
fan53555-regulator nvvrs_pseq rtc-ds3232
ubuntu@ubuntu:~$ v4l2-ctl --list-formats-ext
ioctl: VIDIOC_ENUM_FMT
Type: Video Capture
[0]: 'GREY' (8-bit Greyscale)
Size: Discrete 2048x1200
Interval: Discrete 0.037s (27.000 fps)
[1]: 'XY10' (XAVIER 10-bit/16-bit Greyscale)
Size: Discrete 2048x1200
Interval: Discrete 0.037s (27.000 fps)
[2]: 'XY12' (XAVIER 12-bit/16-bit Greyscale)
Size: Discrete 2048x1200
Interval: Discrete 0.037s (27.000 fps)
ubuntu@ubuntu:~/Downloads/nvidia_jetson_veye_bsp/mv_tools_jetson/i2c_tools$ sudo ./mv_mipi_i2c.sh -r -f version -b 10
[sudo] password for ubuntu:
Executing: ./mv_mipi_i2c_new.sh -r version -b 10
version is C 01.48 and L 03.20
TIMEOUT 30
DEFAULT primary
MENU TITLE L4T boot options
LABEL primary
MENU LABEL primary kernel
LINUX /boot/Image
INITRD /boot/initrd
APPEND ${cbootargs} root=PARTUUID=e7cecac7-8b18-4414-b9b9-41ae8eab84d9 rw rootwait rootfstype=ext4 mminit_loglevel=4 console=ttyTCU0,115200 firmware_class.path=/etc/firmware fbcon=map:0 nospectre_bhb video=efifb:off console=tty0 nv-auto-config
FDT /boot/dtb/kernel_tegra234-p3768-0000+p3767-0001-nv.dtb
OVERLAYS /boot/veyecam/tegra234-p3767-camera-p3768-veye_mvcam-dual-4lane-cam1.dtbo
# When testing a custom kernel, it is recommended that you create a backup of
# the original kernel and add a new entry to this file so that the device can
# fallback to the original kernel. To do this:
#
# 1, Make a backup of the original kernel
# sudo cp /boot/Image /boot/Image.backup
#
# 2, Copy your custom kernel into /boot/Image
#
# 3, Uncomment below menu setting lines for the original kernel
#
# 4, Reboot
# LABEL backup
# MENU LABEL backup kernel
# LINUX /boot/Image.backup
# INITRD /boot/initrd
# APPEND ${cbootargs}
I only have one camera.
I'd be very happy if it worked well! Thank you very much.
I purchased the MV-MIPI-GMAX4002M with the ADP-MV1-V2 adapter. I installed the Jetpack6.2,L4T r36.4.3 on the Jetson Orin NX 8gb. However, unfortunately I cannot install it using the GitHub repository "nvidia_jetson_veye_bsp". How can I proceed with the installation? Thank you very much!