SOLVED RAW-MIPI-AR0234M 在NX平台下,2lane和4 lanes都无法采图
-
首先,第一个建议是先不要改代码,就用我们原有的dtb,调通2lane模式。
其次,你问题中提到的一些小问题:
因为NX MIPI接口与相机线序不同(刚好相反),使用转接板进行线序转接。
看不清楚你接插件的具体样子。这种情况不需要做转接板。FFC线用同面线或者异面线就能实现完全的信号反序。 当然,你用转接板也是可以的。
- 2
@leibnitz said in RAW-MIPI-AR0234M 在NX平台下,2lane和4 lanes都无法采图:
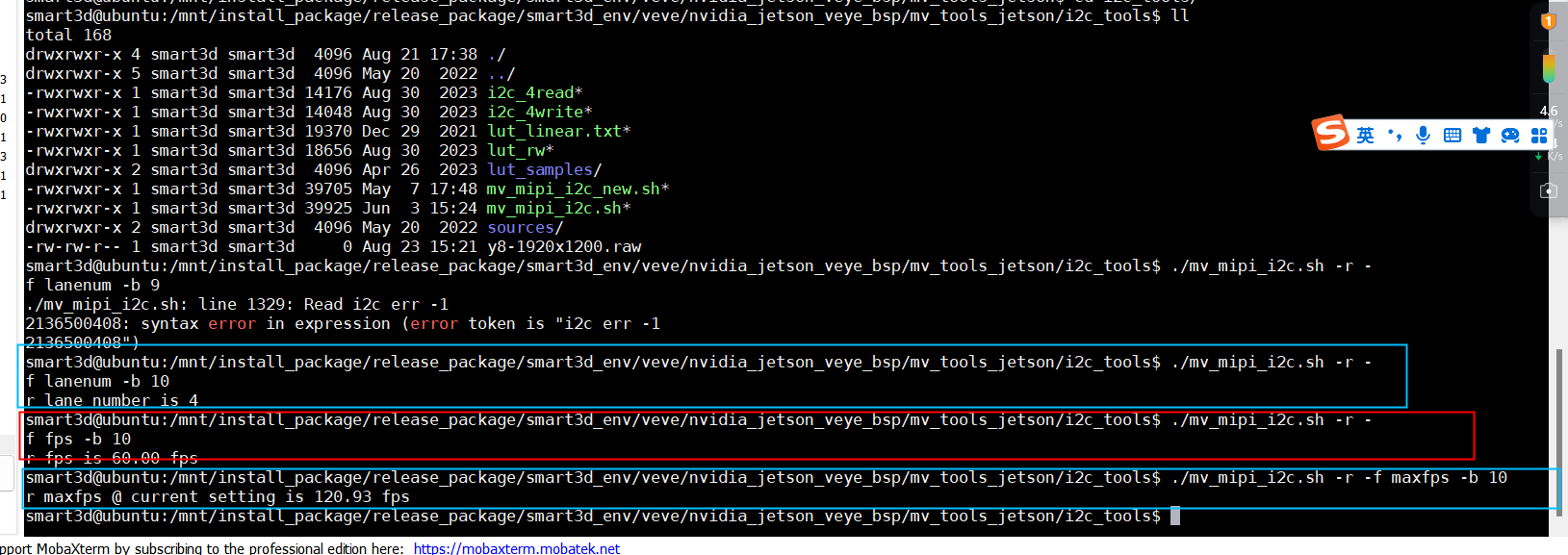
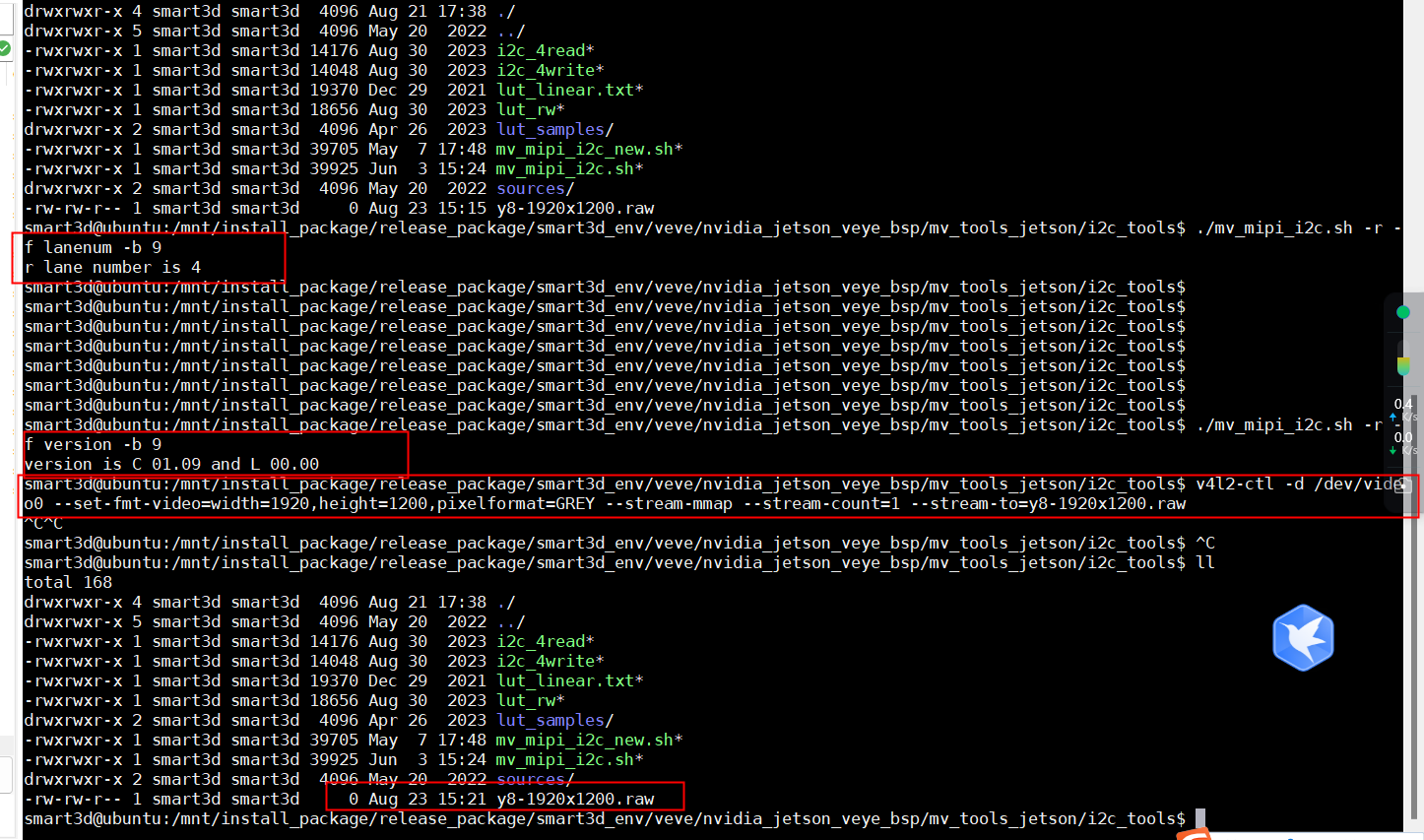
相机无法采图,使用“./mv_mipi_i2c.sh -r -f maxfps -b 9”命令输出最大帧率60fps,如图:
写lanenum之后,读取出来确认一下。
- 3
@leibnitz said in RAW-MIPI-AR0234M 在NX平台下,2lane和4 lanes都无法采图:
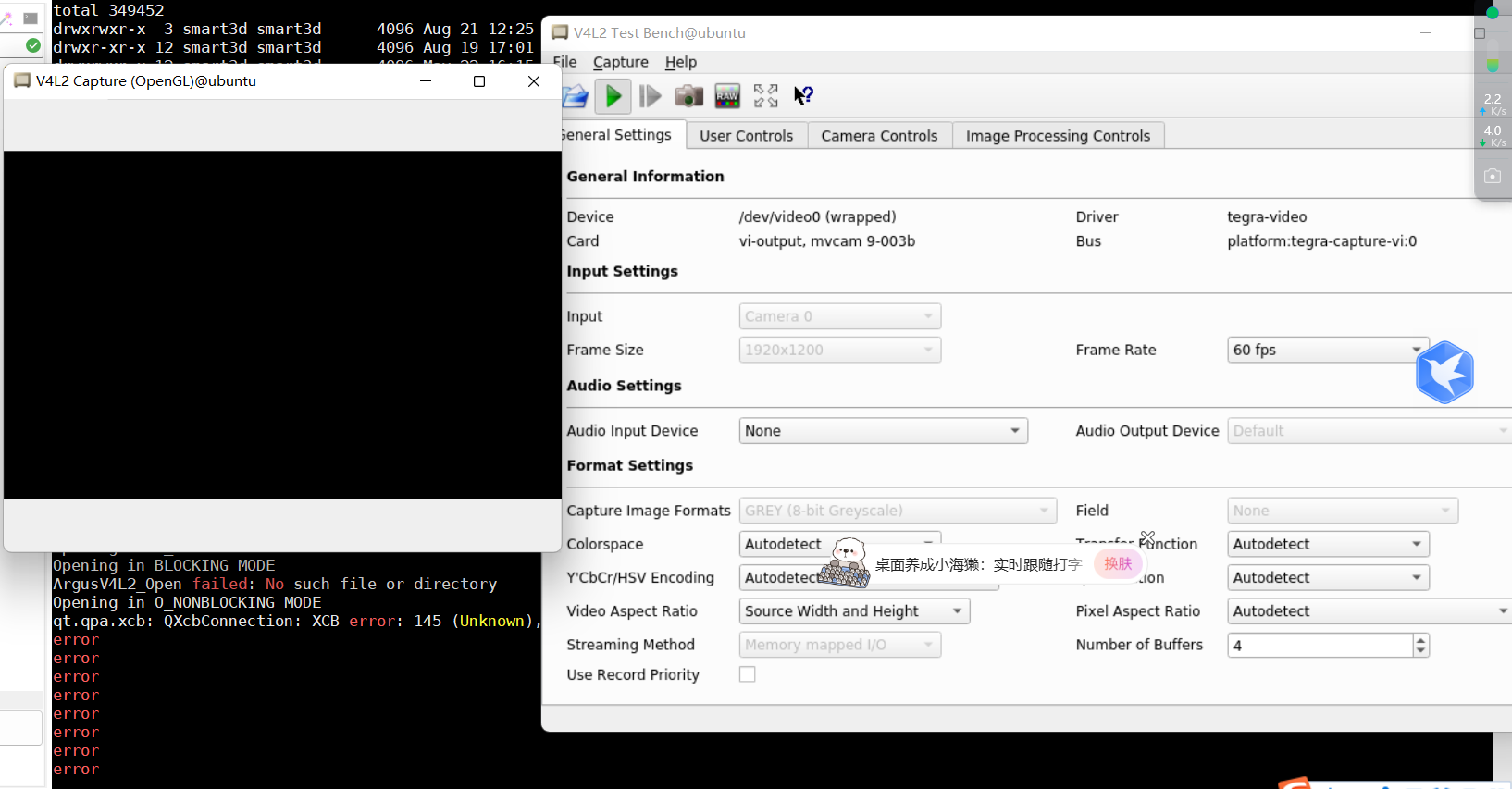
使用“vlc”采集图一直没有图像:
你现在这个阶段,建议先调通v4l2-ctl取图,然后再尝试vlc.
疑问:在NX平台型下使用2 lane和4lane,都无法采集图,而使用i2c命令可以找到相机。
无法采图时,可以另起一个命令行终端,用sudo dmesg命令,看看有没有什么报错。
- 5
@leibnitz said in RAW-MIPI-AR0234M 在NX平台下,2lane和4 lanes都无法采图:
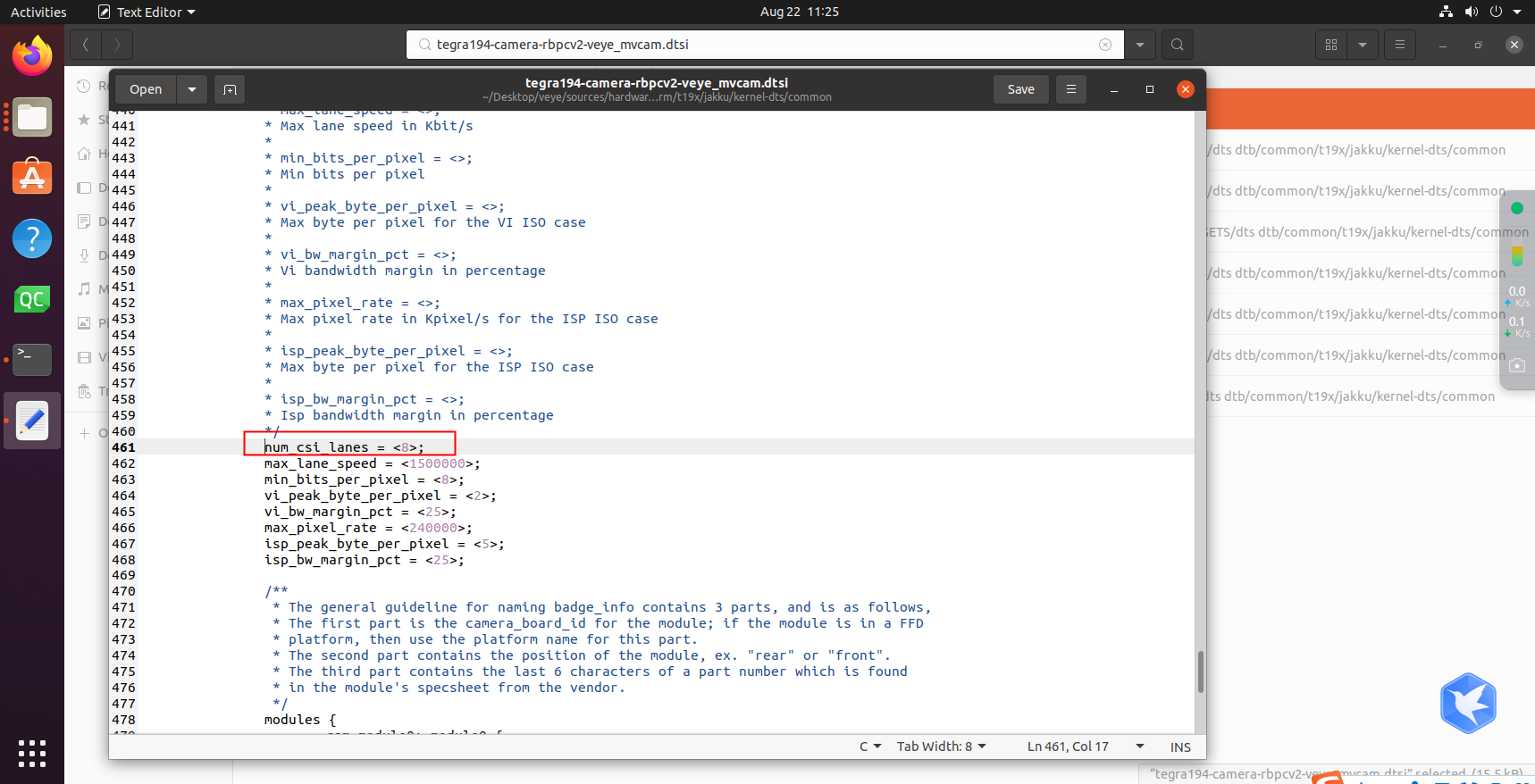
具体编译过程见下图(修改所有的“bus-width”为4):
改成4lane,tegra194-camera-rbpcv2-veye_mvcam.dtsi中,除了bus-width,还有一个地方需要改。
num_csi_lanes = <8>;- 6
对于RAW-MIPI-AR0234M,需要使用下面这个路径下的dtsi来编译。
........\dts dtb\RAW-MIPI-AR0234M\
-
@veye_xumm
2、使用“./mv_mipi_i2c.sh -r -f lanenum -b 9”确认输出为4 lanes,最大帧率120fps。

3、问题依然
4、“v4l2-ctl”和“vlc”都试过,无法采集图像;“sudo dmesg”没有报错。

5、指的将“num_csi_lanes = ”改为“num_csi_lanes = <8>”?6、是使用的........\dts dtb\RAW-MIPI-AR0234M\路径下的dtsi,但是自己编译的dtsi,并没有“RAW-MIPI-AR0234M”路径,有个疑问是我们自己编译的“dts”文件怎么就能确定是与“RAW-MIPI-AR0234M”匹配?在编译过程中并没有发现与““RAW-MIPI-AR0234M””绑定的相关操作
-
@veye_xumm 将“num_csi_lanes ”改为了8,进行从新编译:
并将生成的“tegra194-p3668-all-p3509-0000-4lanes-v2.dtb”进行更新:

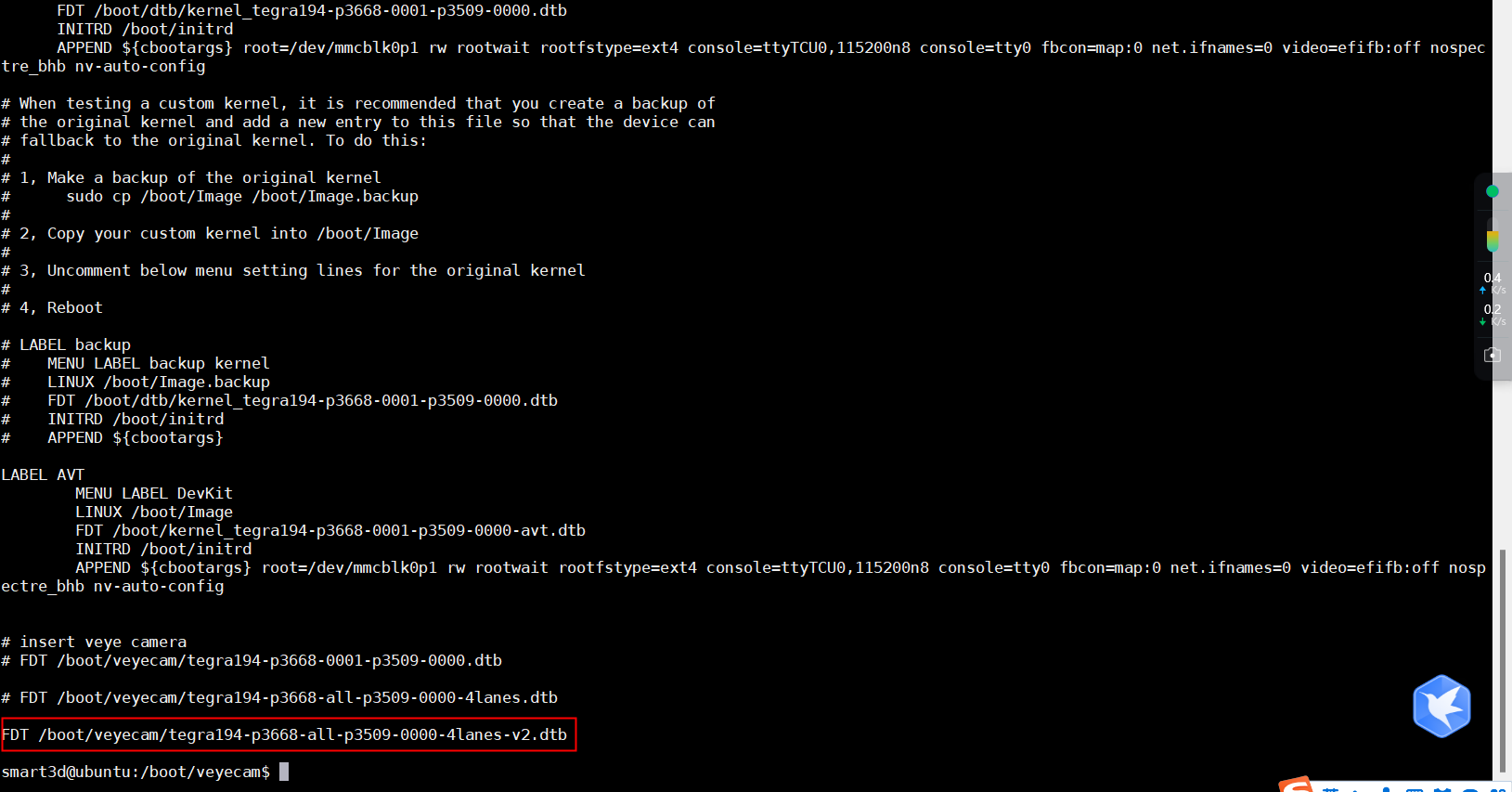
并“sudo depmod”从启后,问题依然!!!
-
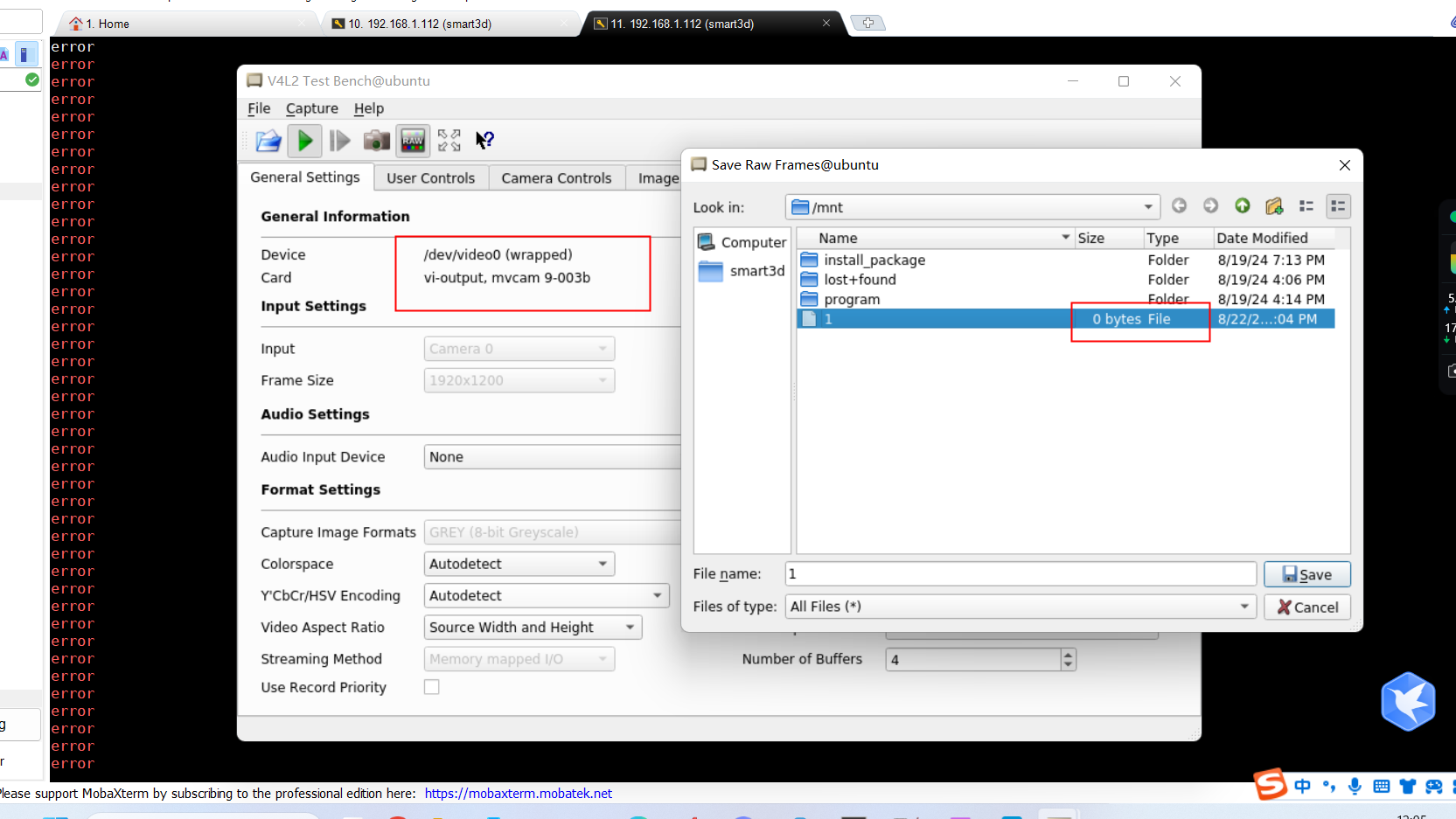
存的图依然的0 KB
-
@veye_xumm 还发现一个问题:
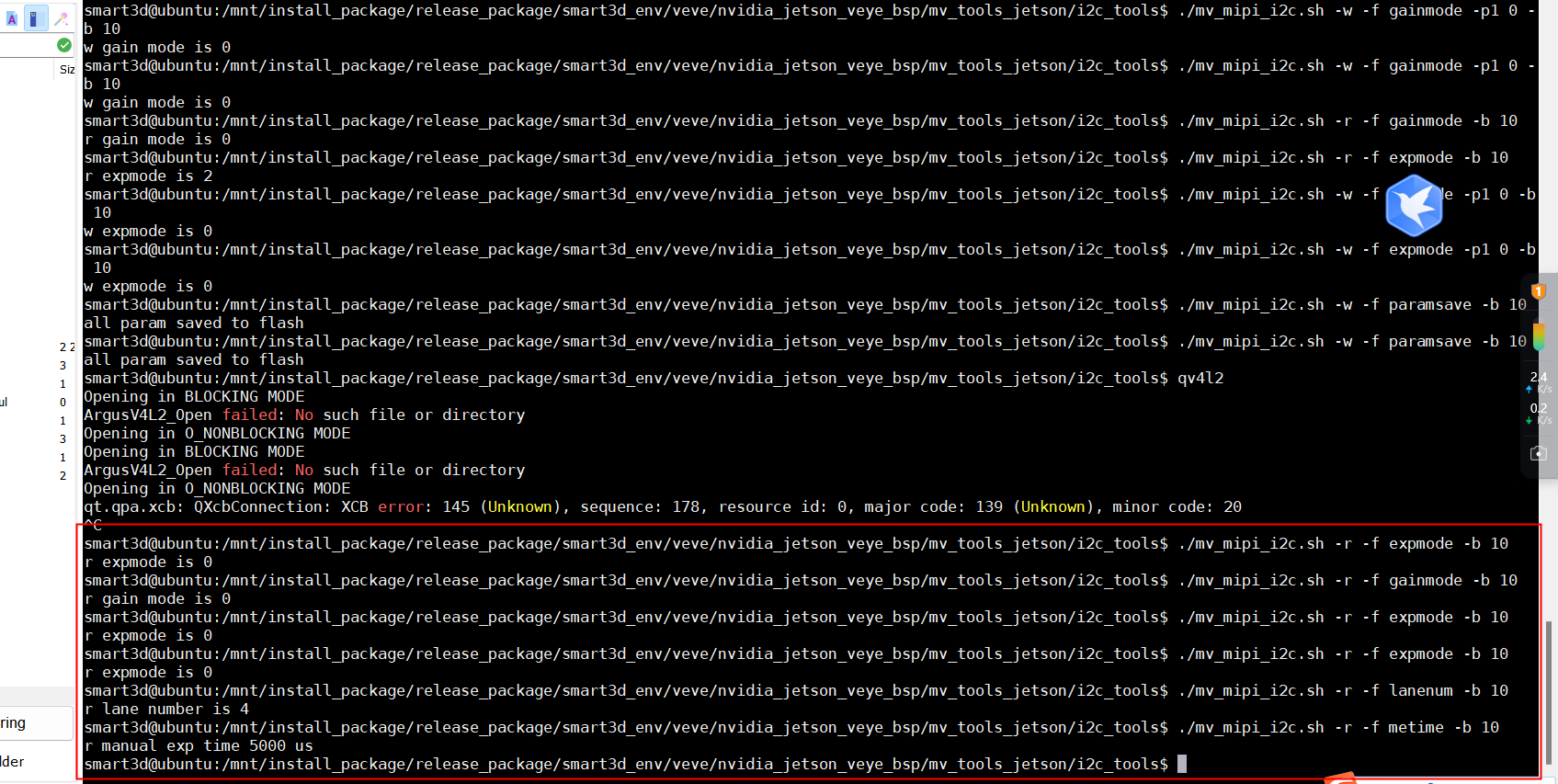
使用“./mv_mipi_i2c.sh -w -f paramsave -b 9”保存参数后,相机断电重启后,参数又恢复为了默认参数。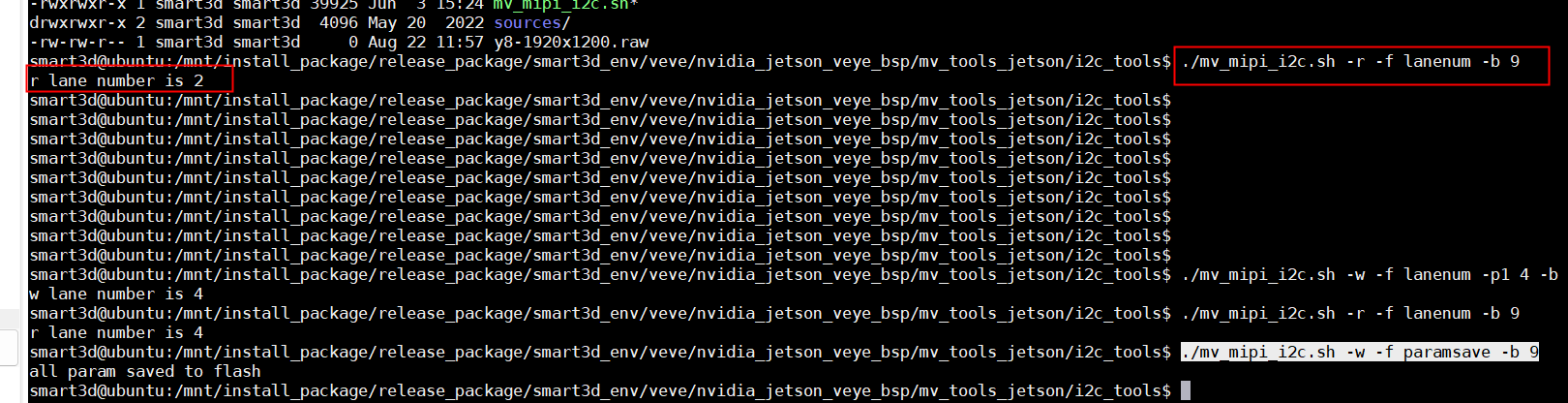
-
@leibnitz said in RAW-MIPI-AR0234M 在NX平台下,2lane和4 lanes都无法采图:
@veye_xumm 还发现一个问题:
使用“./mv_mipi_i2c.sh -w -f paramsave -b 9”保存参数后,相机断电重启后,参数又恢复为了默认参数。这个问题,建议你升级一下下面链接中v1.09版本。
https://www.mediafire.com/folder/dcdjecnkr7vj5/RAW-MIPI-AR0234M升级方法参考这个:
https://wiki.veye.cc/index.php/Mvcam_firmware_update_manual
@leibnitz said in RAW-MIPI-AR0234M 在NX平台下,2lane和4 lanes都无法采图:
有个疑问是我们自己编译的“dts”文件怎么就能确定是与“RAW-MIPI-AR0234M”匹配?在编译过程中并没有发现与““RAW-MIPI-AR0234M””绑定的相关操作
看下面这个链接的part6.4:
https://wiki.veye.cc/index.php/VEYE_CS_Camera_source_for_Jetson/zh#.E7.BC.96.E8.AF.91_3

这个文件,指的就是在dts dtb\RAW-MIPI-AR0234M目录下的对应文件。我依然建议你先搞通2lane的。 如果你用你的底板搞不通,建议你用一下官方开发板的那个底板先。
-
@veye_xumm 在2lanes模式下使用qv4l2可以正常采集到图像。但是采集了30多分钟,板子从启后,无法进入板子系统,且报下列错误:
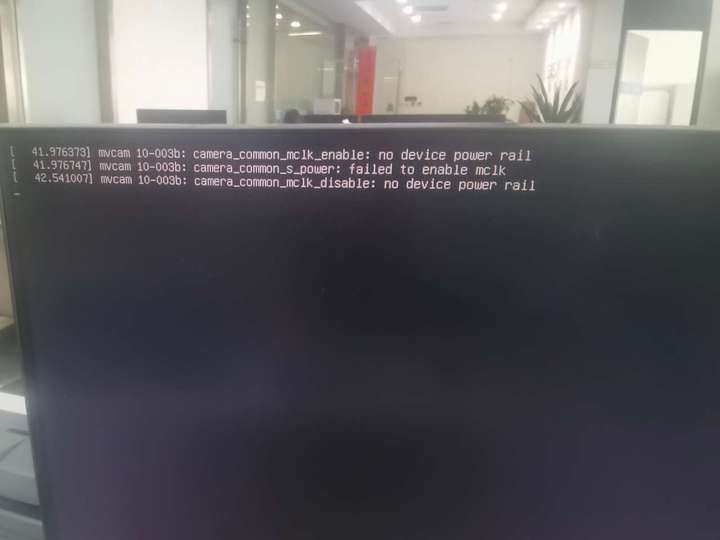
-
@leibnitz 这个错误跟你的现象没关系。这个是驱动加载的时候报的warning而已。如果断电重启之后系统进不去,可能你的系统已经坏掉了。
-
@veye_xumm 这个问题已经解决。
2 lanes下可以采集图像,但是有1个问题(采集到的图像上面有固定的脏污,是因为sensor不洁净导致的吗?):

另外,可否提供4 lanes Jetson NX RAW-MIPI-AR0234m的驱动?
-
@leibnitz
这个看起来像是sensor表面后者镜头面的脏。
sensor表面的话,可以用脱脂棉沾无水乙醇擦拭,进行清洁。驱动的.c部分是不用修改的。 dtb按照之前你发的还有我给补充的两条,进行改动,应该就可以。
-
@veye_xumm
我们安装您的方法(修改“bus-width”为4;修改 “num_csi_lanes”为“8”),也将固件升级到1.09,
但是4 lanes依然只能找到相机,而无法采集到图像
您们可否提供4 lanes的驱动(?我们目前相用它替换掉我们成熟产品里使用的AVT mipi相机。希望得到您们的支持)
我们的环境:
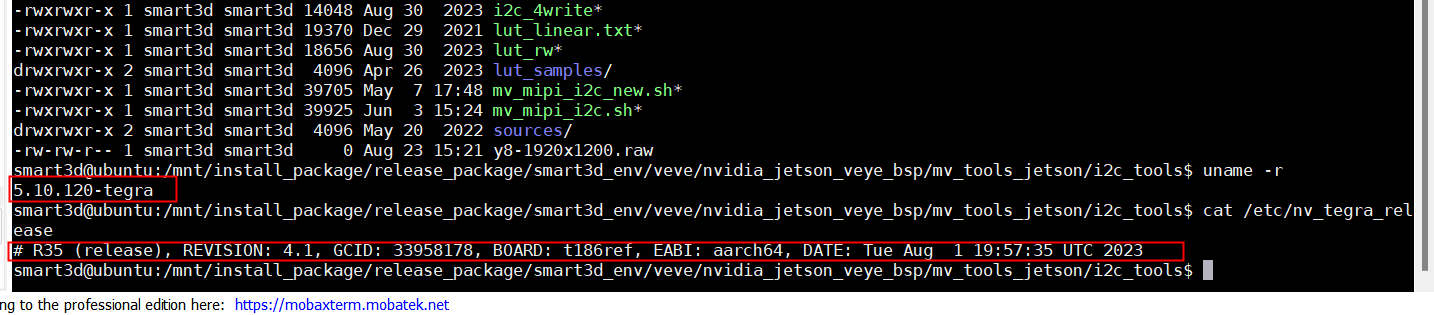
使用的硬件平台是:jetson Xavier NX
-
@leibnitz 按照我的理解,现在这些改动应该就可以调通。
不过我这只有nVidia的开发板,是2lane的,没办法调试。
方不方便把你的板子寄给我,直接用你的板子调试一下? -
@veye_xumm 好的 留一个您的收件地址和联系方式。
-
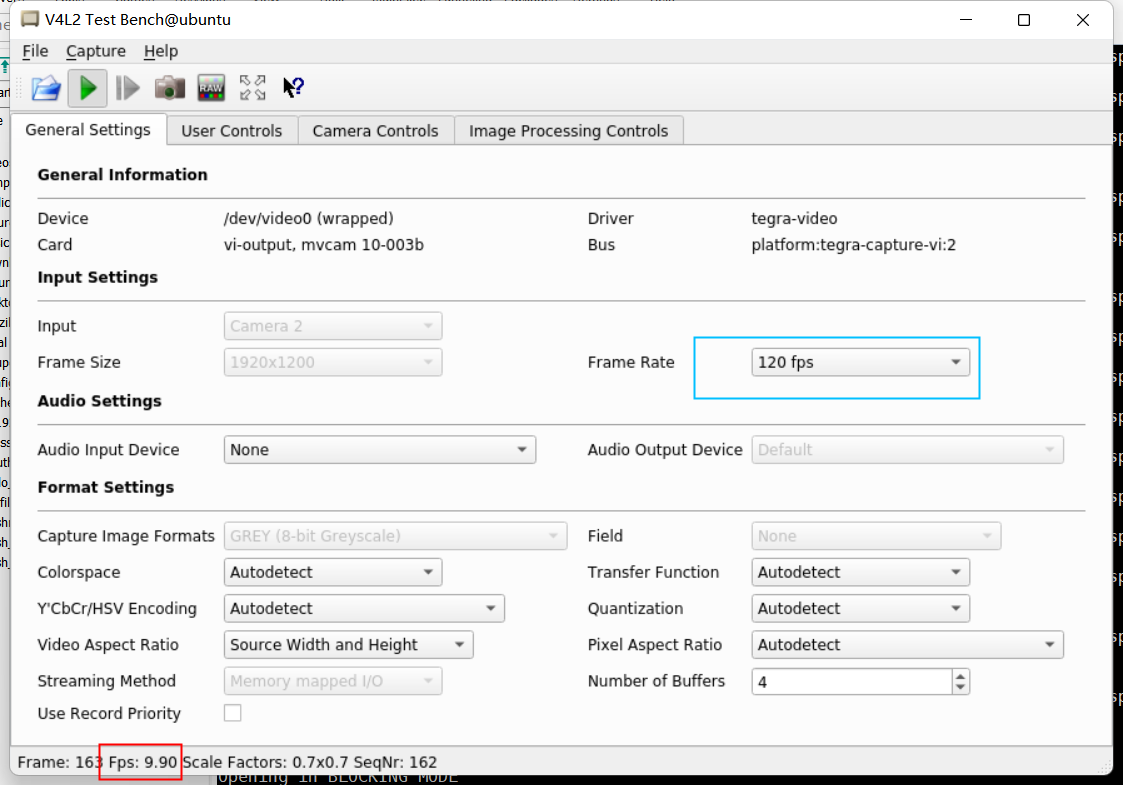
4lane模式下有图了,相机也设置成了4 lanes,dtbs也是更换成了4 lanes的驱动,但是采集帧率缺还是60 fps,请问是哪里设置的不对吗?
-
@leibnitz
你现在fps配置的是60啊~ 配成120就行了。 -
-
@leibnitz
是的,qv4l2拿到图像,进行转码,搬移,预览,做了很多工作。整个pipeline的冗长和软件效率的问题导致预览无法达到相机的输出能力。用下面https://wiki.veye.cc/index.php/Mv_series_camera_appnotes_4_jetson/zh#.E5.B8.A7.E7.8E.87.E7.BB.9F.E8.AE.A1
7.3.2 帧率统计
的命令来统计一下实际相机输出的帧率。