SOLVED 移植imx462摄像头驱动到rk3588时出现了以下的问题,不知道怎么解决,内核版本是5.10
-
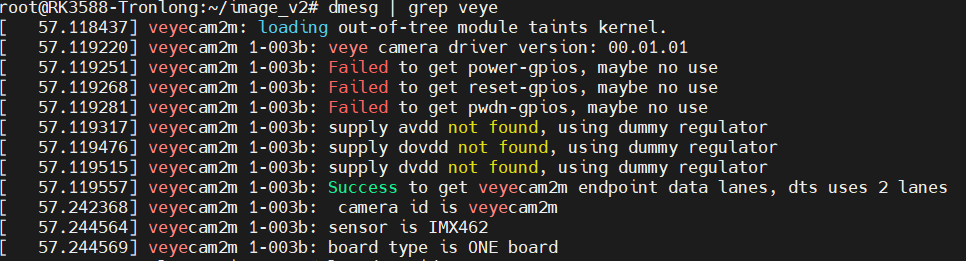
调试串口出现了以下的信息,驱动应该是移植成功了吧,为什么还是检测不到摄像头传感器呢
-
@aike 能显示出相机型号,表示i2c已经调通了。但是由于你的dts没有配对,所以报了你后面这个图的错误,进而没有产生/dev/video0.
-
现在又出现了这个问题,

-
@aike 这个提示i2c不通,你看看这次是否吧resetpin的控制方面的dts改错了。
-
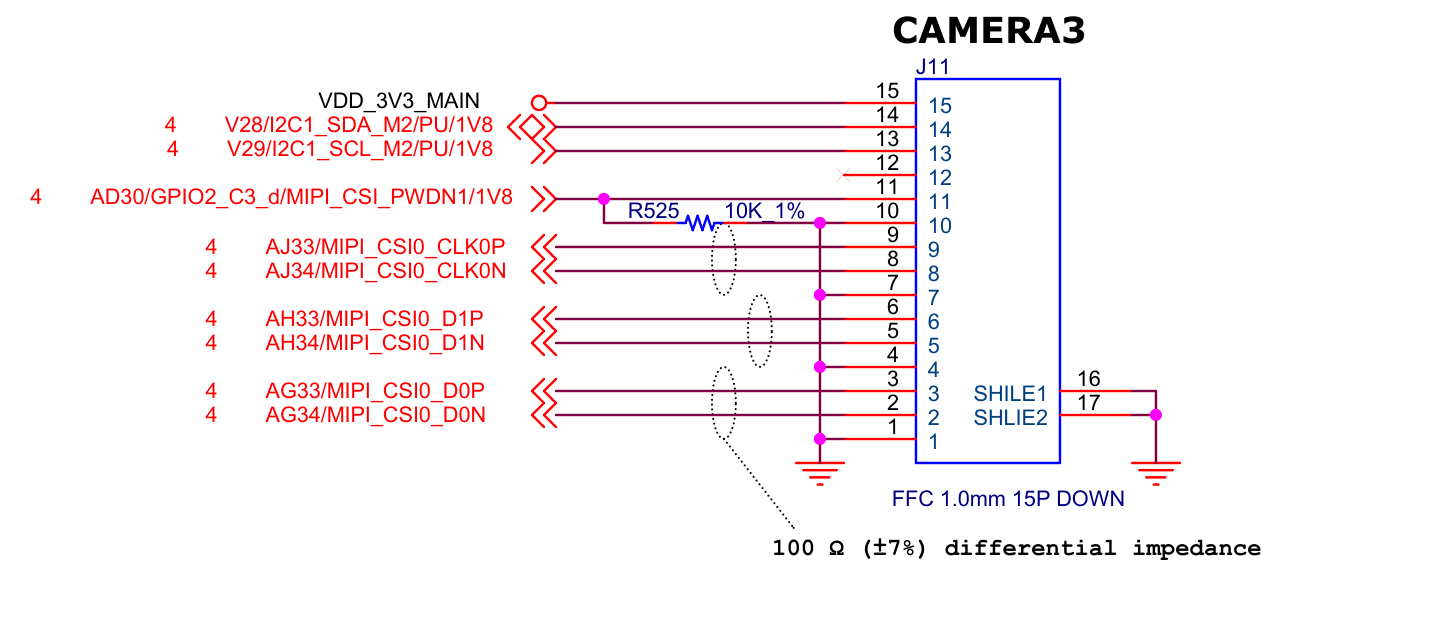
rk3588-veyecam2m.txt 这是摄像头接口的原理图(Uploading 100%)
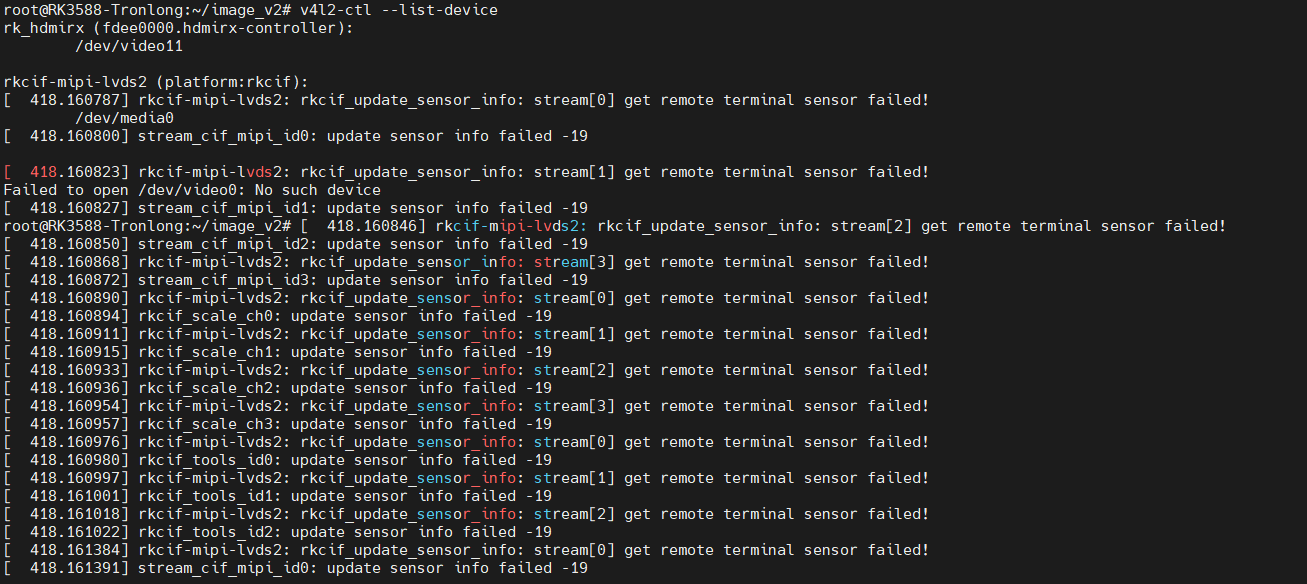
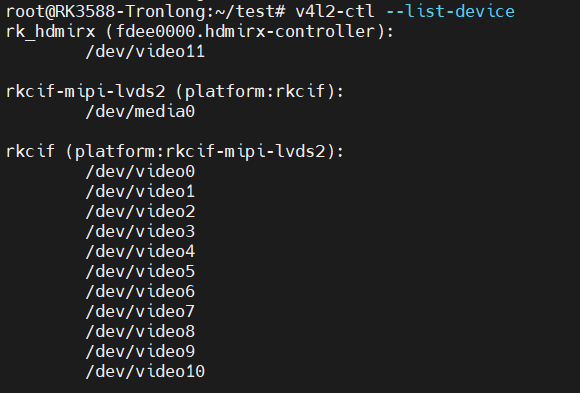
v4l2-ctl --list-device
rk_hdmirx (fdee0000.hdmirx-controller):
/dev/video20rkisp-statistics (platform: rkisp):
/dev/video18
/dev/video19rkcif-mipi-lvds2 (platform:rkcif):
/dev/media0rkisp_mainpath (platform:rkisp0-vir2):
/dev/video11
/dev/video12
/dev/video13
/dev/video14
/dev/video15
/dev/video16
/dev/video17
/dev/media1Failed to open /dev/video0: No such device
接口配对关系.txt
请问哪个node没有没有配对呢 -
@aike
第一步,i2c要调通。上次你曾经调好过。

第二步,dts中关于mipi接口的节点连接关系要写对。你这个原理图是外设接插件的,并没有能表明最终接入到3588用的是哪几个接口。
如果这个板子本身有默认支持的camera,比如ov5640之类的,你可以 参考那个dts。
或者你把这个板子原生支持的摄像头的dts和你现在移植的VEYE模组的dts都发出来,我帮你看看。 -
这是原生支持的imx219摄像头,我是用camera3和camera4[0_1733196166905_tl3588-evm-imx219.dts](Uploading 100%)
这是veye模组的摄像头rk3588-veyecam2m.txt veye模组的摄像头也需要用两个,也就是camera3和camera4,目前只是在调试camera3接口, -
刚刚dts文件没有传上去,我用txt再传输一边imx219摄像头的dts
tl3588-evm-imx219.txt -
@aike 你现在i2c是通的,能识别到摄像头型号,对吗?
-
对的,像这样i2c能识别到摄像头型号

-
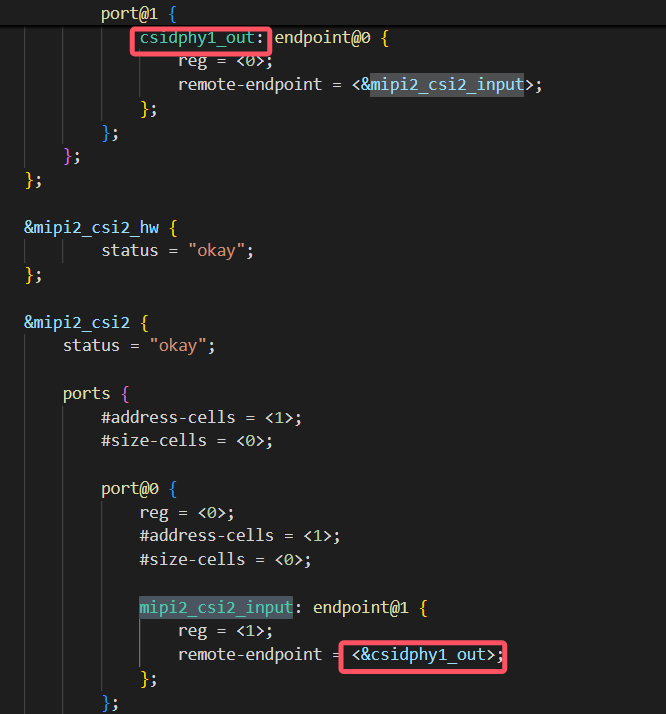
@aike 试试这个
// SPDX-License-Identifier: (GPL-2.0+ OR MIT) /* * Copyright (c) 2022 www.veye.cc * */ #include "tl3588-evm.dts" &i2c1 { status = "okay"; // pinctrl-names = "default"; // pinctrl-0 = <&i2c1m2_xfer>; veyecam2m: veyecam2m@3b{ compatible = "veye,veyecam2m"; reg = <0x3b>; clocks = <&cru CLK_MIPI_CAMARAOUT_M1>; clock-names = "xvclk"; status = "okay"; // pinctrl-names = "default"; // pinctrl-0 = <&mipim1_camera1_clk>; //power-domains = <&power RK3588_PD_VI>; //power-gpios = <&gpio4 RK_PB5 GPIO_ACTIVE_LOW>; reset-gpios = <&gpio2 RK_PC3 GPIO_ACTIVE_LOW>; //pwdn-gpios = <&gpio2 RK_PC3 GPIO_ACTIVE_LOW>; //avdd-supply = <&vcc_mipidcphy1>; //firefly,clkout-enabled-index = <0>; rockchip,camera-module-index = <0>; rockchip,camera-module-facing = "back"; rockchip,camera-module-name = "NC"; rockchip,camera-module-lens-name = "NC"; port { veyecam2m_out0: endpoint { remote-endpoint = <&mipi_dphy1_in_ucam0>; data-lanes = <1 2>; }; }; }; }; &csi2_dphy0_hw { status = "okay"; }; &csi2_dphy1 { status = "okay"; ports { #address-cells = <1>; #size-cells = <0>; port@0 { reg = <0>; #address-cells = <1>; #size-cells = <0>; mipi_dphy1_in_ucam0: endpoint@1 { reg = <1>; remote-endpoint = <&veyecam2m_out0>; data-lanes = <1 2>; }; }; port@1 { reg = <1>; #address-cells = <1>; #size-cells = <0>; csidphy1_out: endpoint@0 { reg = <0>; remote-endpoint = <&mipi2_csi2_input>; }; }; }; }; &mipi2_csi2_hw { status = "okay"; }; &mipi2_csi2 { status = "okay"; ports { #address-cells = <1>; #size-cells = <0>; port@0 { reg = <0>; #address-cells = <1>; #size-cells = <0>; mipi2_csi2_input: endpoint@1 { reg = <1>; remote-endpoint = <&csi_dphy1_out>; }; }; port@1 { reg = <1>; #address-cells = <1>; #size-cells = <0>; mipi2_csi2_output: endpoint@0 { reg = <0>; remote-endpoint = <&cif_mipi2_in0>; }; }; }; }; &rkcif_mipi_lvds2 { status = "okay"; firefly,yuv_camera; port { cif_mipi2_in0: endpoint { remote-endpoint = <&mipi2_csi2_output>; }; }; }; &rkcif_mipi_lvds2_sditf { status = "disabled"; port { mipi_lvds2_sditf: endpoint { remote-endpoint = <&isp0_vir2>; }; }; }; &rkisp0_vir2 { status = "disabled"; port { #address-cells = <1>; #size-cells = <0>; isp0_vir2: endpoint@0 { reg = <0>; remote-endpoint = <&mipi_lvds2_sditf>; }; }; }; &gpio2 { pinctrl-names = "default"; pinctrl-0 = <&mipidphy0_pwr>; camera3-pwdn-set { gpio-hog; gpios = <19 GPIO_ACTIVE_HIGH>; output-high; }; }; &pinctrl { cam { mipidphy0_pwr: mipidphy1-pwr { rockchip,pins = /* camera power en */ <2 RK_PC3 RK_FUNC_GPIO &pcfg_pull_up>; }; }; }; &rkcif { status = "okay"; // memory-region = <&cif_reserved>; }; &rkcif_mmu { status = "okay"; }; &rkisp0 { status = "disabled"; }; &isp0_mmu { status = "disabled"; }; -
上面的代码编译出错,我把这里连接之后在和设备树一起编译内核,再把veyecam2m编译成veyecam2m.ko模块移植进去之后还是有问题
这个是错误截图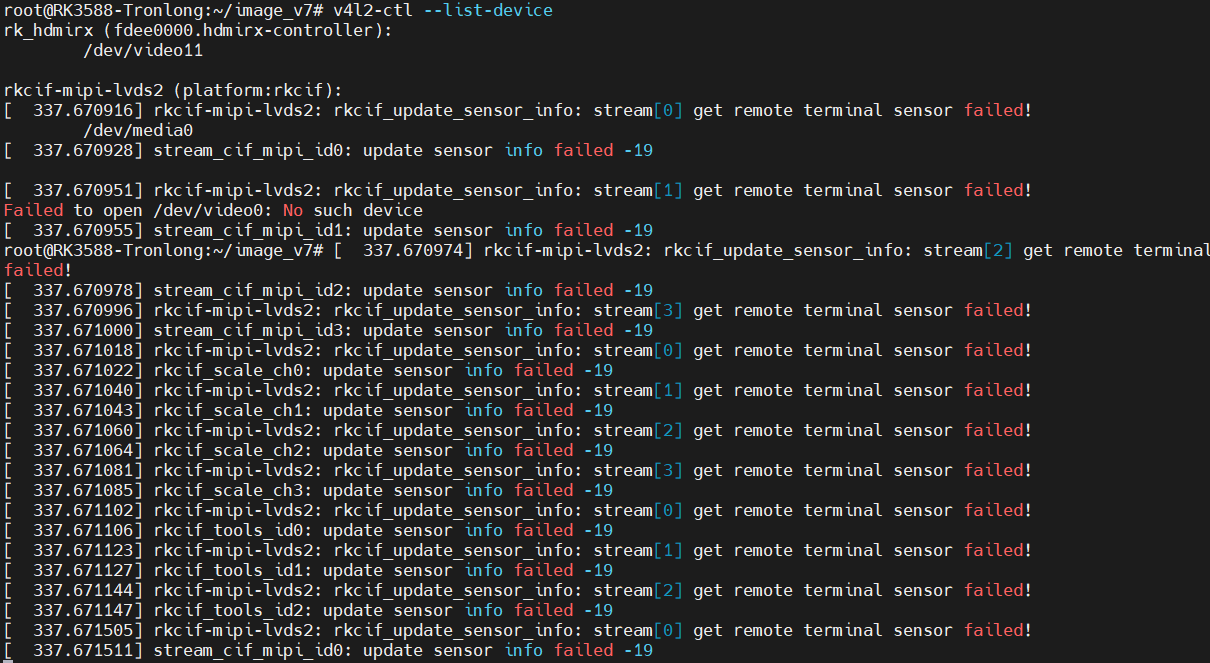
-
@aike 我觉得dts没问题,你可以试试把veyecam2m直接编译到内核里面,而不是独立ko的形式试试。
关于dts的逻辑关系,你可以参考这篇文章。
https://www.cnblogs.com/armsom/articles/17449250.html -
直接整合到内核之后没有看到update sensor info failed 的报错信息,但是没有看到isp的设备文件和拓扑接口
摄像头拓扑结构图
摄像头拓扑结构图.txt
抓取图片也有问题

-
应该是又更近了一步,现在无论是自己基于v4l2写的程序或者是gstreamer获取信息显示的画面都是绿色的
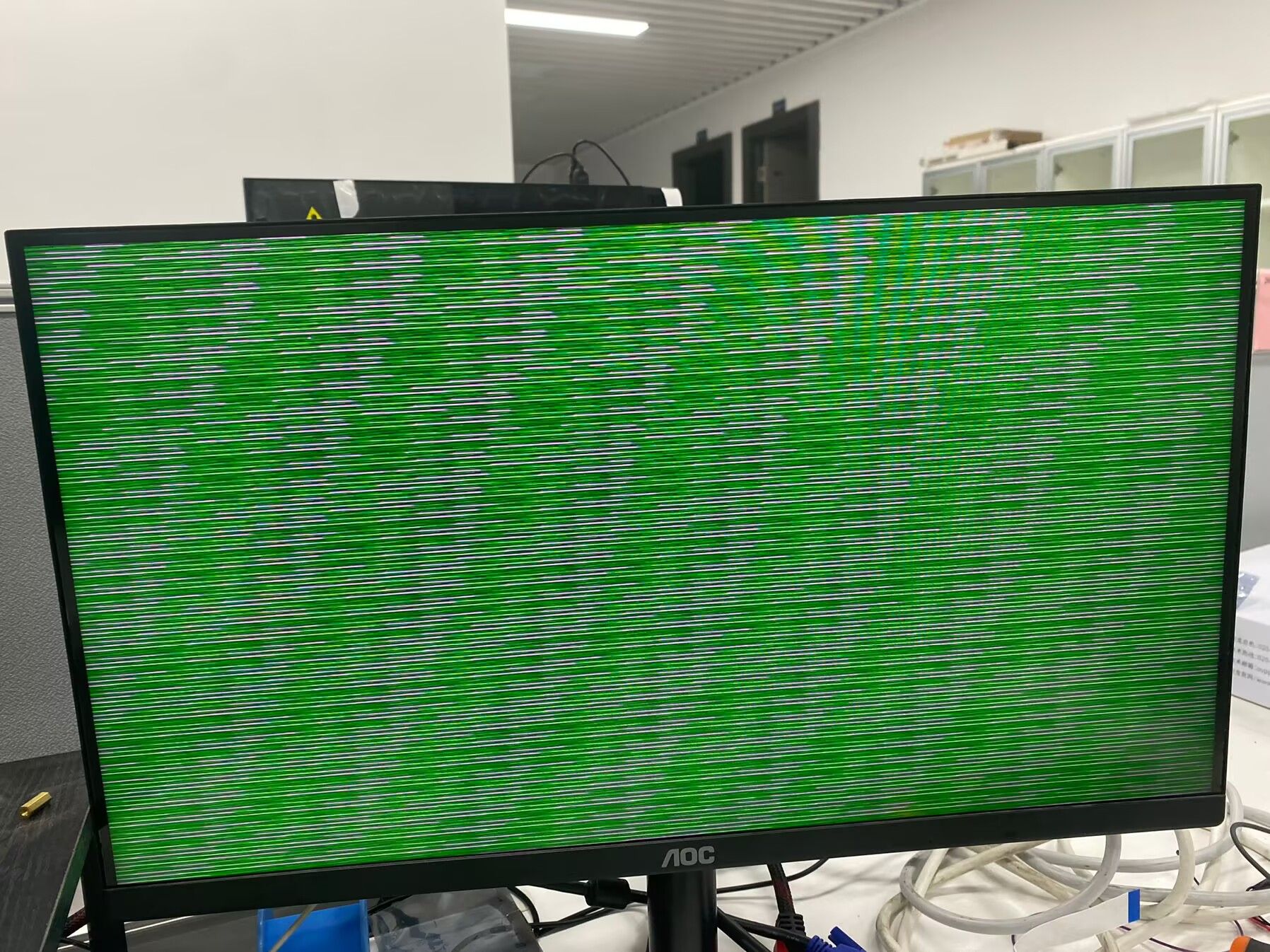

这是什么情况呢 -
@aike 首先,我们这个模组是带有isp的,因此在dts中,isp部分都给bypass掉了。
其次,你可以先试试我们wiki上的gstreamer例子,看看能不能预览。 -
我用gitee上面的gstreamer测试工具测试的时候出现了这些问题
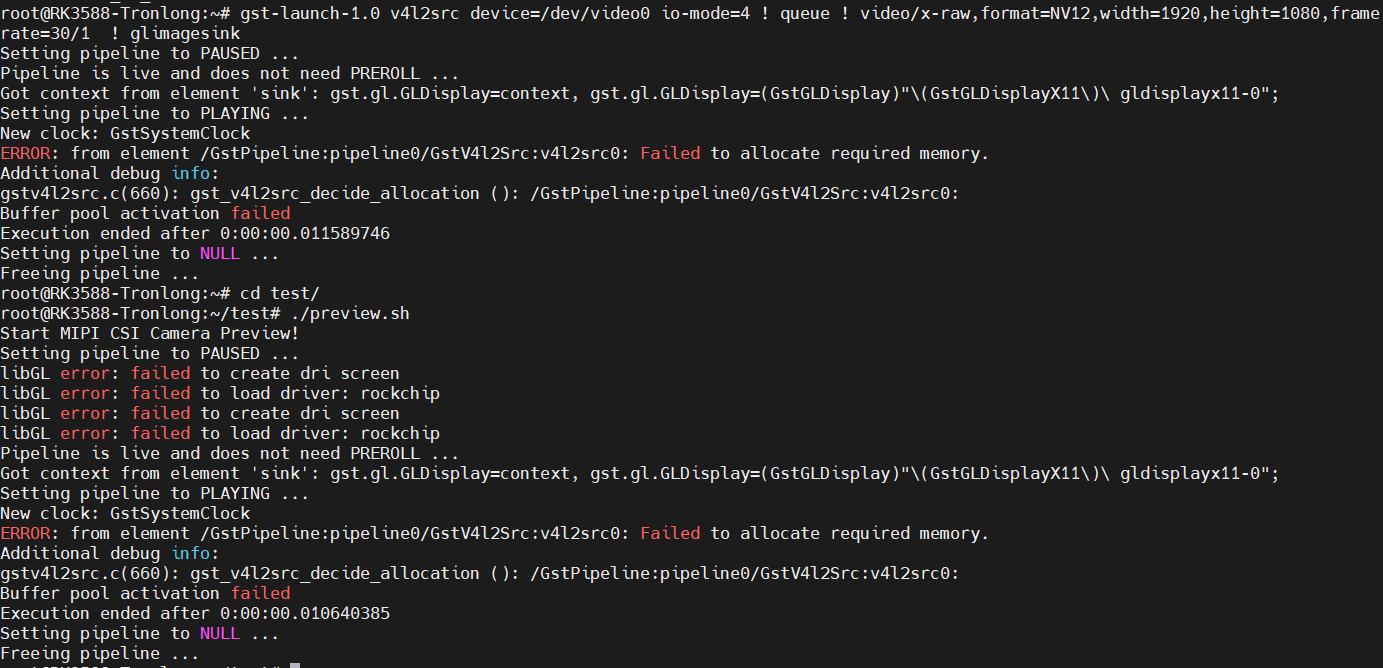
同时串口会打印这些
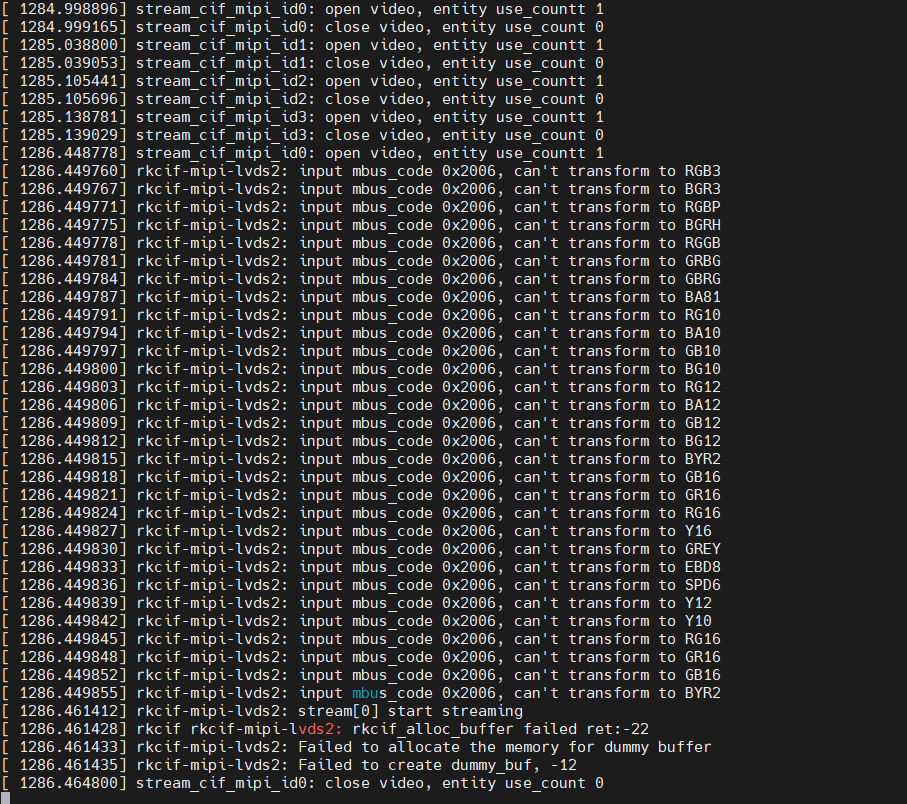
请问这个问题怎么解决 -
@aike 这个我们在其他的板卡上没有遇到过。你的板子本身没有带gstreamer吗? 或者问问板卡厂家。
-
板卡是自带gstreamer的,一直在这里卡住了,会不会是摄像头模组硬件的原因呢
-
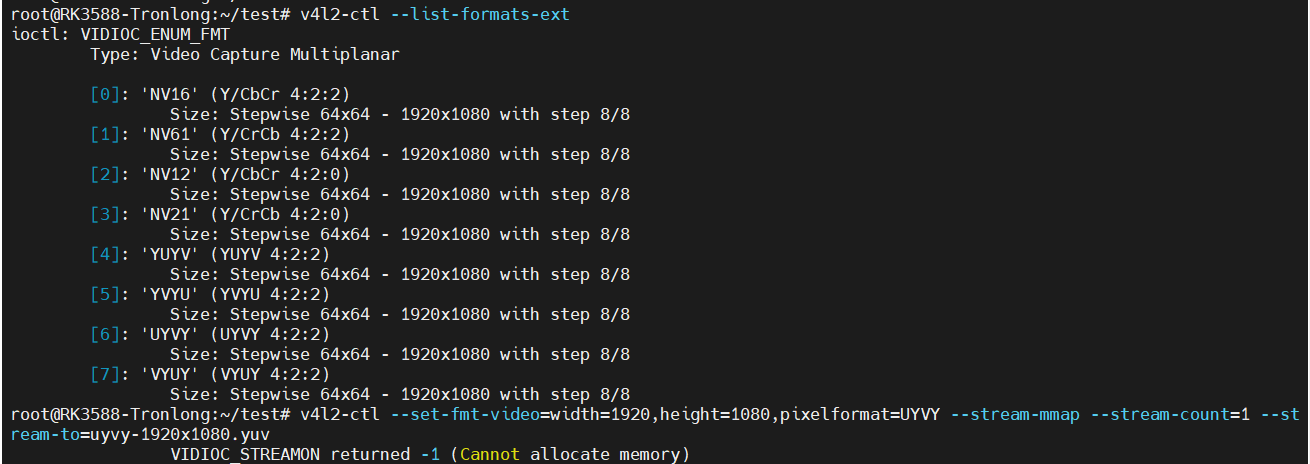
@aike 可能性很小。你试试用这个脚本抓一下图:
v4l2-ctl --set-fmt-video=width=1920,height=1080,pixelformat='NV12' --stream-mmap --stream-count=100 --stream-to=nv12-1920x1080.yuv ``